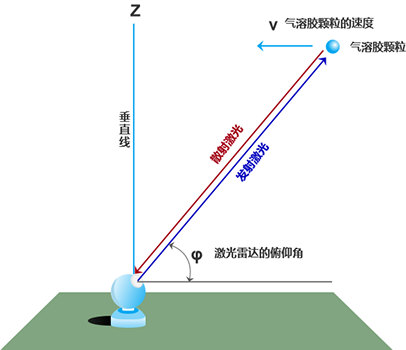
相干多普勒测风激光雷达
在气象领域,测风激光雷达能够提供实时、准确的风场数据,为气象监测和预报提供重要依据。通过连续观测大气风场的变化,可以及时发现和预测天气系统的演变趋势,提高天气预报的准确性和时效性。测风激光雷达的高精度测量能力使得其能够捕捉到大气风场的微小变化,为气候变化研究提供精确的数据支持。通过对长时间序列的风场数据进行分析,可以揭示气候变化的规律和趋势。


| 参数 | 性能指标 |
|---|---|
| 激光波长 | 1550nm |
| 脉冲能量 | 300μj |
| 重复频率 | 10kHz |
| 脉冲宽度 | 100ns、200ns、300ns、 400ns、600ns、800ns |
| 脉冲激光线宽 | <1.3倍衍射极限 |
| 偏振态 | 线偏 |
| 偏振消光比 | >17dB |
| 光束质量,M2 | <1.3 |
| 脉冲输出光纤 | PM1550 |
| 激光安全 | Class 1M |
| 种子功率稳定性 | 5% |
| 光学耦合器 | |
|---|---|
| 光学耦合器 | 2*2 |
| 平衡探测器 | |
|---|---|
| 波长相应范围 | 800 nm~1700 nm |
| 带宽 | 200MHz |
| 低噪声放大器 | |
|---|---|
| 带宽 | 250MHz |
| 放大 | 40 dB |
| 参数 | 性能指标 |
|---|---|
| 采样率 | 500M |
| 采样精度 | 14位 |
| 快速FFT处理能力 | 支持32~1024点FFT |
| 网络接口速率 | 1Gbps |
| 参数 | 性能指标 |
|---|---|
| 处理器 | 飞腾系列(≥8核,≥3.6GHz) |
| 硬盘 | ≥2T,SSD |
| 内存 | ≥16GB,DDR4 |
| 网卡 | 千兆有线以太网卡 |
| 显示接口 | 支持KVM视频输入接口,VGA等 |
| 串口 | 4xRS232 |
| 操作系统 | 国产麒麟系列 |

实时采集雷达探测到的径向基数据,包括风速、风向等关键信息。通过网络和串口等多种通信接口,与雷达的各个子系统(如扫描控制系统、激光驱动器等)进行连接,实现雷达工作状态的实时监测与控制,包括雷达系统的适配参数设置、用户管理等。
实时接收并显示雷达的基数据和状态信息,为预报员和维护人员提供直观、清晰的参考界面。支持雷达的远程开关机、扫描控制以及工作模式的快速切换,实现雷达的远程操控和无人值守功能。将接收到的数据以标准格式文件进行尺存储,并通过网络上报至相关部门,同时具备数据推送功能,确保数据的实时共享和传输。
利用多线程技术,对基数据进行反演与生成处理,并反演一级、二级气象产品等,为气象分析提供丰富多样的数据支持。在生成数据产品的基础上,结合预警设置,产生并发布风害告警信息,为气象预报和灾害预警提供重要依据。

| 一级产品 | 定义 | 测量范围 | 分辨率 | 速测量误差(均方根误差) |
|---|---|---|---|---|
| 水平风速 | 指大气在水平方向上的运动速度,单位通常为米每秒(m/s) | ≥50m/s | ≤0.1m/s | ≤0.8m/s(垂直高度3km以下) |
| 风向 | 指水平风速的方向,通常以角度(0°~360°)表示,0°代表正北,顺时针增加 | 0~360° | ≤0.1° | ≤8° |
| 一级产品 | 定义 | 测量范围 | 速测精度 | |
|---|---|---|---|---|
| 垂直风速(气流) | 指大气在垂直方向上的运动速度,单位为米每秒(m/s) | -20m/s~+20m/s | ≤0.3m/s | ≤0.3m/s |
| 二级产品 | 定义 | 展现形式 |
|---|---|---|
| 风廓线 | 风廓线是指风速和风向随高度变化的曲线或图形表示,反映了大气在不同高度层中的运动状态 | 实时风廓线、分钟级风廓线、半小时风廓线、一小时风廓线 |
| PPI图 | 是激光雷达在水平面内扫描时生成的极坐标图,显示径向风速等参数在水平方向上的分布 | 实时平面位置显示图 |
| RHI图 | RHI图是激光雷达在垂直平面内扫描时生成的直角坐标图,显示径向风速等参数随距离和高度变化的分布 | 实时距离高度显示图 |
| 数据文件 | 定义 | 满足格式 |
|---|---|---|
| 原始回波数据 | 指的是测风激光雷达接收到的未经处理的激光回波信号 | 自定义生成,支持文件存储和回放 |
| 状态参数 | 用于描述需达的工作状态和性能 | 按照《相干多普勒测风激光雷达基数据标准格式》生成,支持文件存储、上传、下载和解析 |
| 告警信息 | 雷达系统根据监测到的状态参数或数据分析结果生成的提示信息,用于指示潜在的问题或危险情况 | 按照《相干多普勒测风激光雷达基数据标准格式》生成,文件存储、上传、下载和解析 |
| 基数据文件 | 是雷达原始数据经过一次反演计算得到的基础数据文件。它包含了雷达观测到的各种风场参数信息,是后续分析和应用的基础 | 按照《相干多普勒测风激光雷达基数据标准格式》生成,支持文件存储、上传、下载和解析 |
| 基数据 | 定义 | 测量范围 | 测量误差 |
|---|---|---|---|
| 径向风速 | 激光雷达探测方向(视线方向)上的大气运动速度分量,单位为米/秒(m/s)正负号表示运动方向(朝向或背离雷达) | -50m/s~+50m/s | ≤0.1m/s |
| 谱宽 | 多普勒信号功率谱的半高全宽,反映风速分布的离散程度,单位为米/秒(m/s) | / | / |
| 谱强 | 多普勒信号的功率强度,反映后向散射粒子密度或雷达系统增益,单位为分贝(b)或无量纲相对值 | / | / |
| 载噪比 | 多普勒信号功率与噪声功率的比值,单位为分贝(db),反映数据质量 | / | / |
| 可信度 | 综合评估数据可靠性的指标,以数值0和1表示 | 0表示数据不可信 1表示数据可信 |
/ |
激光等级为1M,符合人眼安全标准,脉宽可调节,增加适用性,采用半导体激光器,确保激光束的质量和稳定性
具备高速采样率和大数据处理能力,实现实时数据采集和处理确保数据的时效性和准确性
应用FFT等先进算法,快速准确地提取多普勒频移信息,精确计算风速等参数,提升数据处理效率
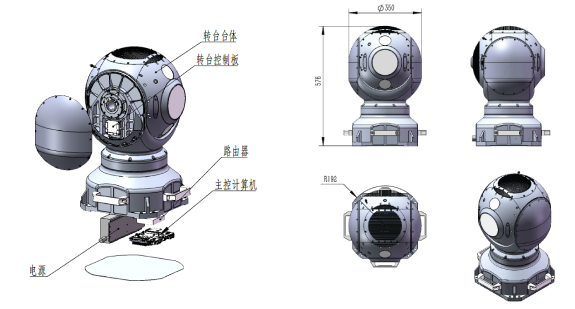
采用两轴同服系统,实现高精度、高稳定性的扫描控制,确保雷达探测的精准性和稳定性
舱体平台设计紧凑,体积小,使于携带和部署,适应各种空间受限的应用场景
具备优秀的环境适应性,能在恶劣天气条件下稳定工作,展现强大的环境适应能力
将数据采集、处理、显示、控制以及风害分析等多项功能集成于一体,实现全流程自动化处理,减少人工操作
软件系统支持多任务并行处理,可根据用户需求进行灵活配置和调整,满足不同场量下的应用需求
支持高速数据采集与处理,确保风场信息即时更新,为气象预报和灾害预警提供及时、准确的数据支持
通过图形化界面实现雷达的远程操控与无人值守功能,降低人工干预成本
基于多线程技术和智能算法,对雷达数据进行综合分析,根据阔值生成风害告警信息,提升灾害应对时效性,为公众提供更加安全、可靠的气象服务